Budowa maszyn roboczych kompleksowe spojrzenie na proces tworzenia zaawansowanych urządzeń
Budowa maszyn roboczych to dziedzina inżynierii mechanicznej i mechatroniki, która obejmuje projektowanie, tworzenie, integrację i optymalizację systemów mechanicznych, elektronicznych i programowych w celu stworzenia autonomicznych lub półautonomicznych urządzeń zdolnych do wykonywania określonych zadań. Maszyny robocze, znane również jako roboty przemysłowe, mobilne, usługowe czy humanoidalne, odgrywają coraz większą rolę w przemyśle, medycynie, logistyce, a nawet w życiu codziennym. Ich budowa wymaga interdyscyplinarnego podejścia, łączącego wiedzę z zakresu mechaniki, elektroniki, informatyki, materiałoznawstwa oraz sztucznej inteligencji. Proces ten jest złożony i wieloetapowy, zaczynając od analizy potrzeb i wymagań, poprzez szczegółowe projektowanie, aż po produkcję, testowanie i wdrożenie.
Współczesne maszyny robocze charakteryzują się coraz większą złożonością i funkcjonalnością. Nie są to już tylko proste ramiona przemysłowe wykonujące powtarzalne ruchy, ale zaawansowane systemy zdolne do adaptacji, uczenia się i interakcji ze środowiskiem oraz ludźmi. Rozwój technologii, takich jak sensoryka, sztuczna inteligencja, uczenie maszynowe czy zaawansowane materiały, otwiera nowe możliwości w projektowaniu i budowie maszyn roboczych, pozwalając na tworzenie urządzeń o niespotykanych dotąd możliwościach. Zrozumienie kluczowych aspektów budowy tych maszyn jest niezbędne dla inżynierów, projektantów i przedsiębiorców chcących wykorzystać potencjał automatyzacji i robotyzacji w swoich dziedzinach działalności.
Artykuł ten ma na celu przybliżenie czytelnikowi kluczowych zagadnień związanych z budową maszyn roboczych. Skupimy się na etapach projektowania, doborze komponentów, procesach produkcyjnych, kwestiach bezpieczeństwa oraz przyszłych trendach w tej dynamicznie rozwijającej się dziedzinie. Zaprezentujemy praktyczne aspekty i wyzwania, przed jakimi stają twórcy zaawansowanych systemów robotycznych, aby dostarczyć kompleksowego obrazu tego fascynującego obszaru inżynierii.
Pierwszym i fundamentalnym etapem w procesie budowy maszyn roboczych jest szczegółowe określenie wymagań i celów, jakie ma spełniać urządzenie. Ten etap wymaga dogłębnej analizy potrzeb potencjalnego użytkownika oraz kontekstu, w jakim maszyna będzie pracować. Należy zdefiniować zakres zadań, precyzję wykonania, szybkość operacji, nośność, wymagane parametry środowiskowe (temperatura, wilgotność, zapylenie) oraz potencjalne interakcje z ludźmi lub innymi maszynami. Niejednokrotnie kluczowe jest przeprowadzenie warsztatów z klientem lub zespołem użytkowników końcowych, aby w pełni zrozumieć ich oczekiwania i ograniczenia. Brak precyzji na tym etapie może prowadzić do kosztownych błędów i konieczności przeprojektowania w późniejszych fazach produkcji.
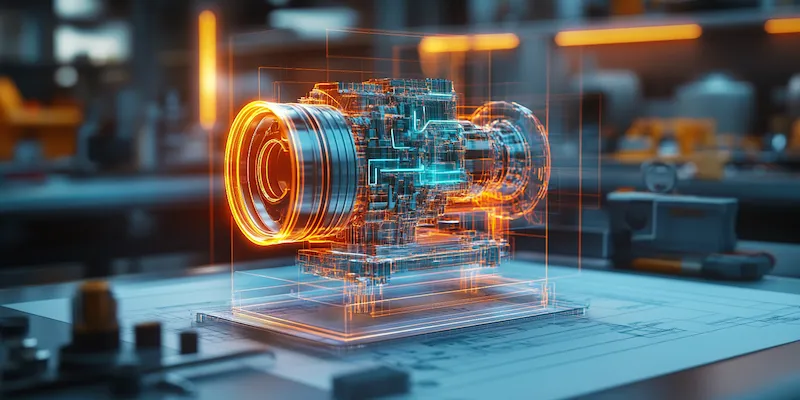
Następnie przechodzimy do fazy koncepcyjnej, gdzie tworzone są wstępne projekty i modele maszyny. Inżynierowie wykorzystują narzędzia do projektowania wspomaganego komputerowo (CAD) do tworzenia trójwymiarowych modeli, symulacji ruchu i analiz wytrzymałościowych. Na tym etapie rozważa się różne architektury robotów, typy mechanizmów (np. ramiona przegubowe, kartezjańskie, cylindryczne, sferyczne), rodzaje napędów (elektryczne, hydrauliczne, pneumatyczne) oraz konfiguracje sensorów. Ważne jest, aby już na tym etapie uwzględnić przyszłe możliwości rozbudowy i modyfikacji maszyny, co zwiększa jej żywotność i elastyczność zastosowania.
Kolejnym krokiem jest szczegółowe projektowanie poszczególnych podsystemów. Obejmuje to projektowanie mechaniczne elementów konstrukcyjnych, dobór odpowiednich materiałów, projektowanie układów napędowych, systemów sterowania, elektroniki, a także opracowanie algorytmów sterujących i interfejsów użytkownika. Optymalizacja każdego z tych elementów jest kluczowa dla osiągnięcia pożądanej wydajności, niezawodności i efektywności energetycznej całej maszyny. Inżynierowie muszą balansować pomiędzy wydajnością, kosztami produkcji, wagą urządzenia a jego ogólną złożonością.
Ważnym elementem jest również symulacja i weryfikacja projektu. Za pomocą zaawansowanych narzędzi symulacyjnych można testować działanie maszyny w różnych warunkach, identyfikować potencjalne problemy i optymalizować parametry pracy jeszcze przed rozpoczęciem fizycznej produkcji. Pozwala to na znaczące skrócenie czasu i kosztów związanych z prototypowaniem i testowaniem. Analizy takie obejmują dynamikę ruchu, analizy termiczne, analizy drgań oraz symulacje interakcji ze środowiskiem. Dopiero po pozytywnym przejściu wszystkich symulacji i weryfikacji projekt jest przekazywany do etapu produkcji.
Dobór odpowiednich komponentów i materiałów do budowy maszyn roboczych
Wybór właściwych komponentów i materiałów ma fundamentalne znaczenie dla jakości, niezawodności, wydajności i kosztów produkcji maszyn roboczych. Każdy element, od śrub i łożysk po silniki, przekładnie, czujniki i systemy sterowania, musi być starannie dobrany, aby sprostać specyficznym wymaganiom aplikacji. Należy brać pod uwagę obciążenia mechaniczne, wymagania dotyczące precyzji, prędkości, temperatury pracy, środowiska (np. narażenie na chemikalia, wilgoć, pył) oraz oczekiwaną żywotność urządzenia. Współczesne maszyny robocze często wymagają zastosowania zaawansowanych materiałów, takich jak stopy aluminium, tytanu, kompozyty węglowe czy tworzywa sztuczne o wysokiej wytrzymałości, które pozwalają na zmniejszenie masy przy jednoczesnym zachowaniu lub zwiększeniu wytrzymałości.
Silniki i napędy stanowią serce każdej maszyny roboczej. Wybór odpowiedniego typu silnika (np. serwomotor, silnik krokowy, silnik prądu stałego) zależy od wymagań dotyczących dynamiki, precyzji pozycjonowania i kontroli prędkości. Równie ważny jest dobór odpowiednich przekładni, które umożliwiają zwiększenie momentu obrotowego i precyzyjne przeniesienie napędu. Popularne rozwiązania to przekładnie planetarne, harmonijkowe czy ślimakowe, z których każda ma swoje specyficzne cechy i zastosowania. Inżynierowie muszą uwzględnić również sprawność energetyczną napędów, aby zminimalizować zużycie energii i generowanie ciepła.
Systemy sensoryczne są kluczowe dla autonomii i inteligencji maszyn roboczych. Obejmują one szeroką gamę czujników, takich jak:
- Czujniki położenia i kąta (enkodery, potencjometry, żyroskopy) niezbędne do precyzyjnego określania pozycji elementów robota.
- Czujniki siły i momentu obrotowego, pozwalające na kontrolowanie interakcji z otoczeniem i zapobieganie uszkodzeniom.
- Kamery i systemy wizyjne (widzenie maszynowe) umożliwiające rozpoznawanie obiektów, nawigację i inspekcję.
- Czujniki zbliżeniowe i ultradźwiękowe służące do detekcji przeszkód i bezpiecznego poruszania się.
- Czujniki temperatury, ciśnienia i przepływu do monitorowania warunków pracy i diagnostyki.
Dobór odpowiednich czujników, ich kalibracja i integracja z systemem sterowania są kluczowe dla skutecznego działania maszyny. System sterowania, obejmujący kontrolery, sterowniki PLC, komputery przemysłowe oraz oprogramowanie, musi być zdolny do przetwarzania danych z sensorów w czasie rzeczywistym i generowania odpowiednich sygnałów sterujących dla napędów. Wybór platformy sprzętowej i programowej zależy od złożoności zadania, wymagań dotyczących szybkości obliczeń oraz potrzeb w zakresie komunikacji z innymi systemami. Integracja wszystkich tych elementów w spójną i funkcjonalną całość stanowi jedno z największych wyzwań w budowie maszyn roboczych.
Proces produkcji i integracji podzespołów w maszynach roboczych
Po fazie projektowania i doborze komponentów następuje etap produkcji i integracji. Proces ten wymaga precyzyjnego wykonania poszczególnych elementów mechanicznych, obróbki skrawaniem, spawania, formowania wtryskowego czy druku 3D, w zależności od zastosowanych materiałów i złożoności części. W przypadku elementów niestandardowych często stosuje się precyzyjną obróbkę CNC, która zapewnia wysoką dokładność wymiarową i powtarzalność. Równie istotna jest jakość wykonania powierzchni, która może wpływać na tarcie, zużycie i właściwości aerodynamiczne lub hydrodynamczne elementów.
Integracja podzespołów mechanicznych i elektrycznych wymaga ścisłego przestrzegania dokumentacji technicznej i procedur montażowych. Proces ten często obejmuje montaż ram, osi, przegubów, a następnie instalację silników, przekładni, prowadnic liniowych i elementów przeniesienia napędu. Kluczowe jest zapewnienie odpowiedniego luzu montażowego, smarowania i wstępnego napięcia elementów, co ma wpływ na płynność ruchu i trwałość mechanizmów. Następnie montowane są układy elektryczne i elektroniczne, w tym okablowanie, czujniki, sterowniki, panele sterowania oraz zasilacze. Należy zwrócić szczególną uwagę na poprawność połączeń elektrycznych, izolację oraz zabezpieczenie przed zakłóceniami elektromagnetycznymi.
Kolejnym ważnym etapem jest integracja oprogramowania i konfiguracja systemów sterowania. Po zamontowaniu wszystkich podzespołów, konieczne jest wgranie odpowiedniego oprogramowania sterującego, kalibracja czujników oraz konfiguracja parametrów pracy. Programowanie maszyn roboczych może obejmować tworzenie ścieżek ruchu, algorytmów sterowania, logiki działania oraz interfejsów użytkownika. W przypadku robotów przemysłowych często wykorzystuje się dedykowane języki programowania i środowiska deweloperskie dostarczane przez producentów robotów. W przypadku bardziej złożonych systemów, integracja może wymagać współpracy z ekspertami od automatyki i robotyki.
Ostatnim etapem przed wdrożeniem jest kompleksowe testowanie i walidacja. Maszyna robocza jest poddawana szeregowi testów, które mają na celu sprawdzenie jej funkcjonalności, wydajności, bezpieczeństwa i niezawodności. Obejmuje to testy ruchowe, testy obciążeniowe, testy dokładności pozycjonowania, testy reakcji na awarie oraz testy działania w symulowanych warunkach pracy. Wszelkie wykryte błędy i niedoskonałości są identyfikowane i usuwane, a parametry pracy optymalizowane. Dopiero po pomyślnym przejściu wszystkich testów i uzyskaniu akceptacji klienta, maszyna jest gotowa do wdrożenia w docelowym środowisku pracy.
Bezpieczeństwo i ergonomia w budowie maszyn roboczych dla ochrony ludzi
Bezpieczeństwo jest absolutnym priorytetem w budowie maszyn roboczych, zwłaszcza tych, które współpracują z ludźmi lub pracują w ich otoczeniu. Projektując i budując roboty, inżynierowie muszą stosować się do licznych norm i dyrektyw dotyczących bezpieczeństwa maszyn, aby zminimalizować ryzyko wypadków i urazów. Obejmuje to projektowanie systemów bezpieczeństwa, takich jak bariery fizyczne, czujniki obecności, kurtyny świetlne, przyciski bezpieczeństwa i systemy awaryjnego zatrzymania. Kluczowe jest również zapewnienie odpowiedniego poziomu ochrony przed porażeniem prądem, zagrożeniami mechanicznymi (np. zgnieceniem, przecięciem) oraz zagrożeniami związanymi z ruchem maszyny.
Ergonomia odgrywa równie ważną rolę, szczególnie w przypadku maszyn roboczych przeznaczonych do współpracy z człowiekiem (coboty) lub do wykonywania zadań w środowiskach usługowych. Projektowanie z uwzględnieniem ergonomii oznacza tworzenie interfejsów użytkownika, które są intuicyjne i łatwe w obsłudze, minimalizując wysiłek poznawczy i fizyczny operatora. Dotyczy to również projektowania fizycznych elementów maszyny, takich jak punkty interakcji, przyciski sterujące czy dostęp do funkcji, tak aby były one łatwo dostępne i wygodne w użyciu. Dobrze zaprojektowana ergonomia przyczynia się nie tylko do komfortu pracy, ale także do zwiększenia efektywności i zmniejszenia ryzyka błędów.
Kwestie bezpieczeństwa obejmują również aspekty związane z niezawodnością działania maszyny. Projektowanie z myślą o redundancji kluczowych systemów, stosowanie wysokiej jakości komponentów oraz regularne przeglądy techniczne i konserwacja pomagają zapobiegać nieprzewidzianym awariom, które mogłyby stanowić zagrożenie. Ważne jest również opracowanie procedur postępowania w sytuacjach awaryjnych oraz zapewnienie odpowiedniego szkolenia dla operatorów i personelu technicznego obsługującego maszyny robocze. Analiza ryzyka powinna być przeprowadzana na każdym etapie cyklu życia produktu, od projektu po wycofanie z eksploatacji.
Współczesne trendy w budowie maszyn roboczych coraz mocniej kładą nacisk na współpracę człowiek-robot (Human-Robot Collaboration, HRC). W tym kontekście bezpieczeństwo i ergonomia nabierają jeszcze większego znaczenia. Coboty są projektowane tak, aby mogły pracować bezpośrednio obok ludzi bez konieczności stosowania rozbudowanych systemów ochronnych. Osiąga się to poprzez ograniczenie siły i prędkości ruchu, zastosowanie elastycznych materiałów obudowy oraz zaawansowanych systemów monitorowania otoczenia. Projektowanie bezpiecznych i ergonomicznych interfejsów komunikacyjnych między człowiekiem a robotem jest kluczowe dla efektywnej i bezpiecznej współpracy.
Przyszłość budowy maszyn roboczych i jej wpływ na przemysł
Przyszłość budowy maszyn roboczych rysuje się w barwach dalszej miniaturyzacji, zwiększania autonomii i inteligencji, a także coraz szerszego zastosowania w nowych dziedzinach. Rozwój sztucznej inteligencji i uczenia maszynowego otwiera drogę do tworzenia robotów, które będą w stanie uczyć się na podstawie doświadczeń, adaptować się do zmieniających się warunków i podejmować złożone decyzje bez bezpośredniego nadzoru człowieka. Przewiduje się dalszy postęp w dziedzinie robotyki mobilnej, umożliwiającej autonomiczną nawigację w złożonych środowiskach, co znajdzie zastosowanie w logistyce, eksploracji czy usługach.
Kolejnym ważnym trendem jest rozwój robotyki miękkiej (soft robotics), wykorzystującej elastyczne materiały i mechanizmy inspirowane naturą. Roboty miękkie mają potencjał do bezpieczniejszej interakcji z delikatnymi obiektami, co jest kluczowe w medycynie (np. roboty chirurgiczne, rehabilitacyjne) oraz w obsłudze delikatnych produktów w przemyśle spożywczym czy kosmetycznym. Ich budowa jest często inspirowana biologią, co pozwala na tworzenie urządzeń o niezwykłej zręczności i zdolnościach adaptacyjnych.
Wpływ budowy maszyn roboczych na przemysł będzie nadal znaczący, prowadząc do dalszej automatyzacji procesów produkcyjnych, zwiększenia efektywności i jakości wyrobów. Zastosowanie robotów w przemyśle 4.0, w połączeniu z Internetem Rzeczy (IoT) i analizą danych, pozwoli na tworzenie inteligentnych fabryk, gdzie maszyny będą komunikować się ze sobą, optymalizować produkcję w czasie rzeczywistym i samodzielnie diagnozować potencjalne problemy. To z kolei przyczyni się do większej elastyczności produkcji i możliwości tworzenia spersonalizowanych produktów na masową skalę.
Wzrośnie również znaczenie robotów usługowych, które będą wspomagać ludzi w codziennych czynnościach, zarówno w domach, jak i w miejscach pracy. Dotyczy to robotów sprzątających, asystentów opieki, robotów dostawczych czy nawet robotów towarzyszących. Rozwój technologii pozwoli na tworzenie coraz bardziej zaawansowanych i intuicyjnych w obsłudze urządzeń, które będą integralną częścią naszego życia. Budowa maszyn roboczych, dzięki ciągłym innowacjom, będzie nadal kształtować przyszłość technologii i społeczeństwa, otwierając nowe możliwości i stawiając przed nami nowe wyzwania.